1 minute read
 Walking simulation
Walking simulation
This is a very successful attempt to build a system that can simulate walking with all types of two-legged characters. It's extremely funny as well!
Normally, if you need a computer-generated character to walk, there are only two ways you can achieve it. You either use motion capture, which can give good results but which is awkward and time-consuming - and yet still not perfect. Or you can animate the object manually. That's even more time-consuming and there are no strong references to guide the accuracy of the animation.
Certain types of movement and behaviour are releatively easy to model: flocks of birds of schools of fish are good examples. But walking is an extremely complex process, involving a sophisticated mix of flesh, bones, muscle and nerves (and, of course, at least one brain!).
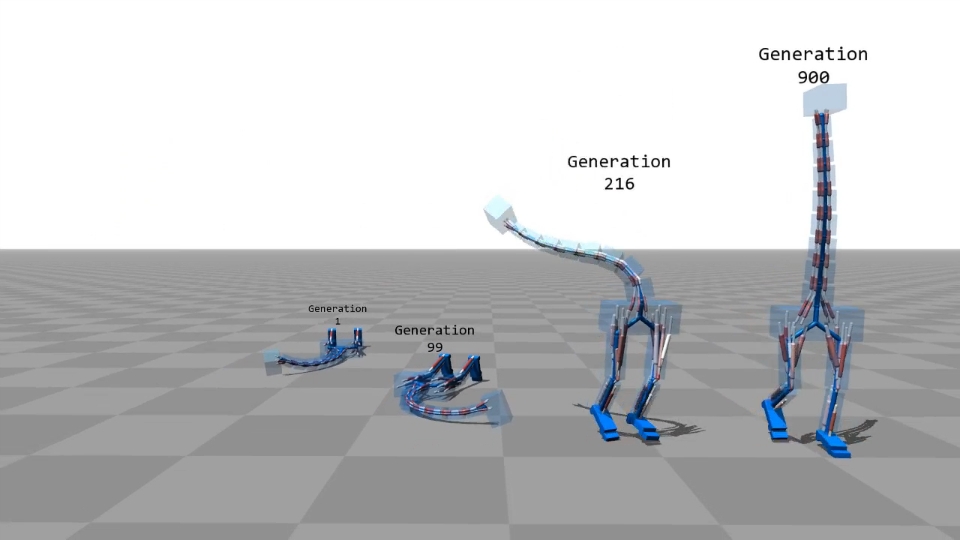
The makers of this video have figured out a way to simulate walking using just the basic structures and parameters of a two-legged creature. Because the technique is generic, they can apply it to a wide and wonderful variety of characters. The process "learns" iteratively, and in the video that follows we can see the increasing levels of sucess and sophistication as up to 900 generations of learning lead to remarkably natural-looking walking, for objects that have never "seen" the real activity.
The key is that the vital interactions and structures are represented here. And because this simulation is not dependent on a myriad other factors, it can easily be ported to a wide variety of two-legged creatures.
Watch the video to see how the technique evolves across generations, how the characters deal with obstacles (including some that are uncermoneously thrown at them!) and look out for the outtakes at the end. We think that all academic papers should feature outtakes.
Here are the Authors' notes to accompany the video:
We present a muscle-based control method for simulated bipeds in which both the muscle routing and control parameters are optimized. This yields a generic locomotion control method that supports a variety of bipedal creatures. All actuation forces are the result of 3D simulated muscles, and a model of neural delay is included for all feedback paths. As a result, our controllers generate torque patterns that incorporate biomechanical constraints. The synthesized controllers find different gaits based on target speed, can cope with uneven terrain and external perturbations, and can steer to target directions.
Tags: Technology

RedShark 2020 @ All rights reserved.
Comments