1 minute read
 Scans from your mobile
Scans from your mobile
Microsoft’s latest innovation, MobileFusion, turns any mobile phone into a 3D scanner without the need for any additional hardware.
Microsoft’s attempts to fuse real and virtual spaces have come a long way since the launch of its notoriously finicky Kinnect sensor system. While work continues apace on HoloLens, it’s Augmented Reality glasses system, the company’s research division has thrown up a more immediately practical technology — one that allows any Android, iOS or Windows mobile phone owner to build a 3D model by panning the device around a real-world object.
The technology has been developed by Peter Ondruska, Ph.D. candidate at Oxford University who began work on the project while interning at Microsoft Research, in collaboration with Microsoft employees Pushmeet Kohli and Shahram Izadi. “What this system effectively allows us to do is to take something similar to a picture, but it's a full 3D object,” says Ondruska.
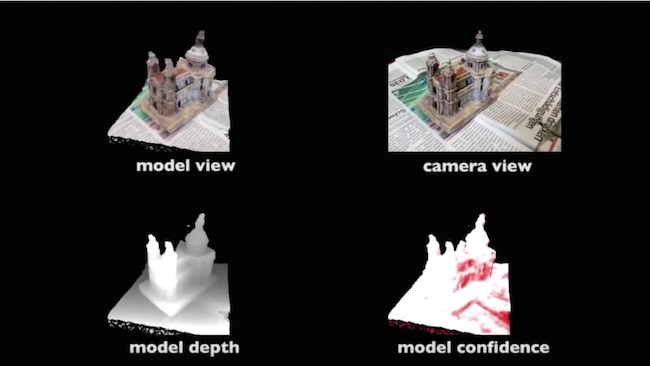
Rather than rely on point-based systems to define volumes and cloud-based computing to process data, MobileFusion instead reconstructs realtime 3D surface models directly on the mobile phone. As the user moves the phone around the subject the model fidelity is continually refined, with realtime feedback making it possible to judge when enough data has been captured. Its creators claim their solution is more lightweight in data terms and also faster than any competing systems (the computation on the phone itself takes just seconds).
The capture of models for subsequent 3D printing is one of the key uses for the tech, but clearly something that puts 3D model acquisition within the reach of every mobile owner has the potential to impact on a multitude of disciplines and industries, including previsualisation and visual effects for filmmaking, video game and AR/VR asset creation, photography and the visual arts. The catch? Frustratingly, Microsoft currently has no firm release plans, though Izadi says they do hope to make it available to the general public at some point.
Read more about the technology here: http://www.robots.ox.ac.uk/~mobile/Papers/2015ISMAR_ondruska.pdf
Tags: Technology

RedShark 2020 @ All rights reserved.

Comments